Table des matières
QUADRICOPTERES
Fiche projet

- Medium 3mm,, Aluminium
- Speedy 300
- Inkscape
- SH2282000
- cc
- quadricoptere, quadcopter, multirotor, drone, DIY
Table des matières
Présentation de la réalisations des quadricoptères électriques télécommandés.
Cette page fait office de documentation pour tous les mutirotor du Fab Lab du Carrefour Numérique²
Le quadricoptere représenter ici permet juste de voler à vue, et donc de s'amuser !
Il est en pleine évolution et attendez vous bientôt à découvrir un autre drone bien plus performant, semi-carbone, qui sera multi-usages !
Il pourra faire de la course en FPV mais aussi des film avec une bonne stabilisation.
On peut donc considérer cette page et ce quadri comme un test pour faire des progrès.
Certaines choses vont changer… STAY TUNED @SS228_
PARTIE MÉCANIQUE
Les matériaux qui sont utilisé doivent être léger, solide, résistant à plusieurs types de situation comme la chaleur, le froid, l'humidité,etc…
Liste des matériaux nécessaire à la constitution d'un quadricoptère:
Medium 3 mm
 Il est parfait pour une phase de test mais il ne résiste pas aux chocs.
Il est parfait pour une phase de test mais il ne résiste pas aux chocs.
Épaisseur: 3mm.
Fonction: Châssis
Acheter ici
Polyméthacrylate de méthyle
 Autrement appelé : Plexiglass
Autrement appelé : Plexiglass
Épaisseur: 3mm.
Fonction: Châssis et coque rigide pour la centrale inertielle.
Acheter ici
Plaque de carbone
 La fibre de carbone revient certes plus cher à l'achat mais elle casse plus difficilement que le contreplaqué ou le medium, elle est aussi plus légère.
La fibre de carbone revient certes plus cher à l'achat mais elle casse plus difficilement que le contreplaqué ou le medium, elle est aussi plus légère.
Épaisseur: 3mm.
Fonction: Châssis
Acheter ici
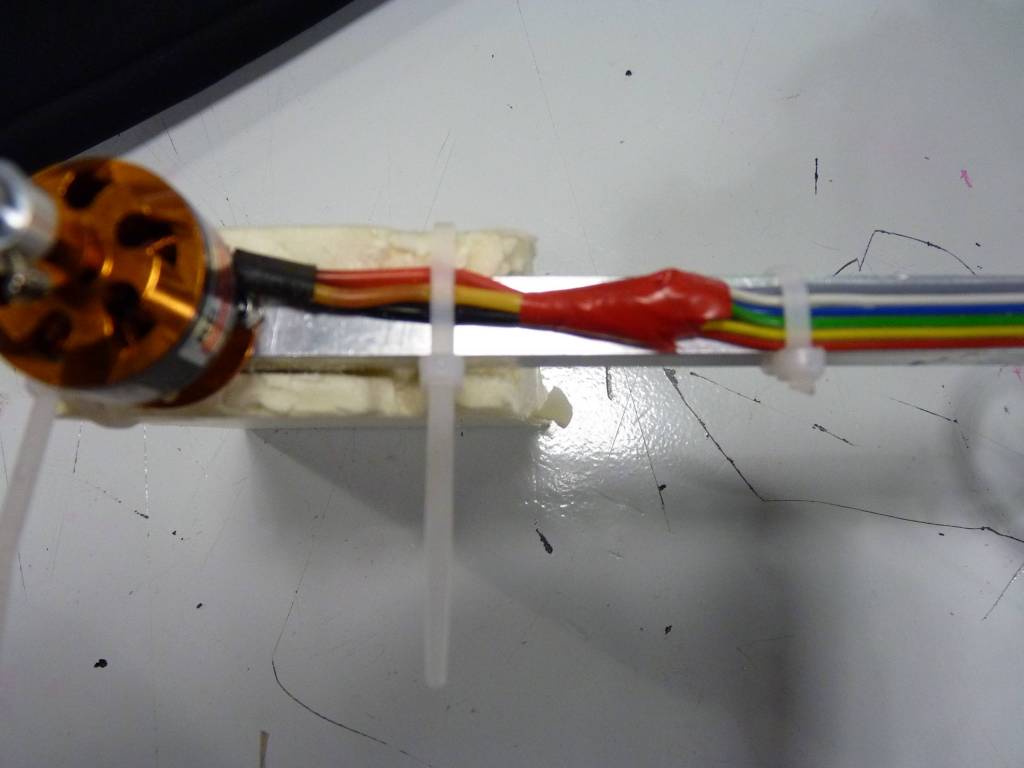
Tube d'aluminium Carré
 L'aluminium est d'un excellent rapport prix/poids/solidité.
L'aluminium est d'un excellent rapport prix/poids/solidité.
Fonction: Châssis
Acheter ici
Polychlorure de vinyle
 Fonction: Faire des pieds amortissant du châssis.
Tordu au fer a souder pour l'adapter
au tube d'aluminium Carré.
Fonction: Faire des pieds amortissant du châssis.
Tordu au fer a souder pour l'adapter
au tube d'aluminium Carré.
Hélices
 Je conseille des hélices plus récentes en sachant que celle-ci sont un vieux modèle qui est beaucoup moins bien optimisé que les ceux plus récents.
Acheter ici
Je conseille des hélices plus récentes en sachant que celle-ci sont un vieux modèle qui est beaucoup moins bien optimisé que les ceux plus récents.
Acheter ici
Moteurs
 Spécification:
Spécification:
Rctimer CF2812-14 1534KV Outrunner Brushless Motor
Power: 206 W\\Voltage: 7.40 V
Designed for: RC Airplane
Brush: brushless
Runner: outrunner
KV: 1534 rpm/V
RPM: 17027
Max voltage: 11.10 V
Nominal current: 19.00 A
Max current: 28.00 A
ESC Required: 30 A
No. of cells: 2 - 3 Lipo
Dimensions
Can Lenght: 32 mm
Total Length: 48 mm
Shaft: 3.17 mm
Diameter: 29 mm
Weight: 50 g
Fonction: faire tourner les hélices.

PARTIE ÉLECTRONIQUE À BORD DU QUADRICOPTÈRE
Contrôleurs de puissances
 Spécification:
Spécification:
RCTimer ESC 30A Brushless Motor Speed Controller
Input voltage:DC 6-16.8V(2-4S Lixx)
BEC:5V 2amp
Running current:30A(Output: Continuous 30A, Burst 40A up to 10 Secs.)
Size: 36mm (L) * 26mm (W) * 7mm (H).
Weight: 32g.
Fonction: produire un courant triphasé alimentant les moteurs bruchless.
Acheter <Documentaion> ici !
Centrale inertielle
 La centrale inertielle permet la stabilité du quadricoptere .
La centrale inertielle permet la stabilité du quadricoptere .
Utilisation d'une NAZE 32
avec son logiciel de controle
Fonction: Stabilisation gyroscopique, réception des commandes du récepteur pour transformations en PWM pour les contrôleurs de puissance, programmable.
récepteur (RX)
 Spécification:
Spécification:
2.4GHz HITEC OPTIMA 6 Voies
Antenne omnidirectionnelle amplifiée
Raccordement de puissance supplémentaire (SPC)
Mode SmartScan sélectionnable
Caractéristiques techniques:
Bande: 2,4GHz AFHSS
Nombre de voies: 6
Dimensions : 46.00 x 21.00 x 11.00mm
Poids : 15g
PARTIE ÉLECTRONIQUE DE PILOTAGE
Télécommande (TX)

Batterie d'alimentation d’émetteur

CHARGEUR ET BATTERIE
Batterie
 Spécification:
Spécification:
Nvision Batterie Lipo 3S - 11.1V/3300Mah - 30C
Utilisation d'une batterie :
-de marque nVision
-composée de 3 cellules
-d'un ampérage de 3300 mAh
-en Lithium Polymère
-30C
Fonction: alimentation de puissance des contrôleurs de puissance et de l’électronique embarquée.
Chargeur
 Spécification:
Spécification:
Operating voltage range: DC11.0-18.0 Volt / AC to DC adaptor(DC11.0-18.0V/5A)
Circuit power: Max.charge power 50W / Max.discharge power 5W
Charge Current Range: .1~5.0A
Discharge current range: 0.1-1.0A
Current drain for balancing Li-po: 300mAH/cell
LiIon/LiPo/LiFe cells : 1-6
NiCd/NiMH cells : 1-15
Pb battery voltage: 2~20v
Net Weight: 277g
Unit Package Gross Weight: 580g
Dimensions: 133x87x33mm
Acheter ici
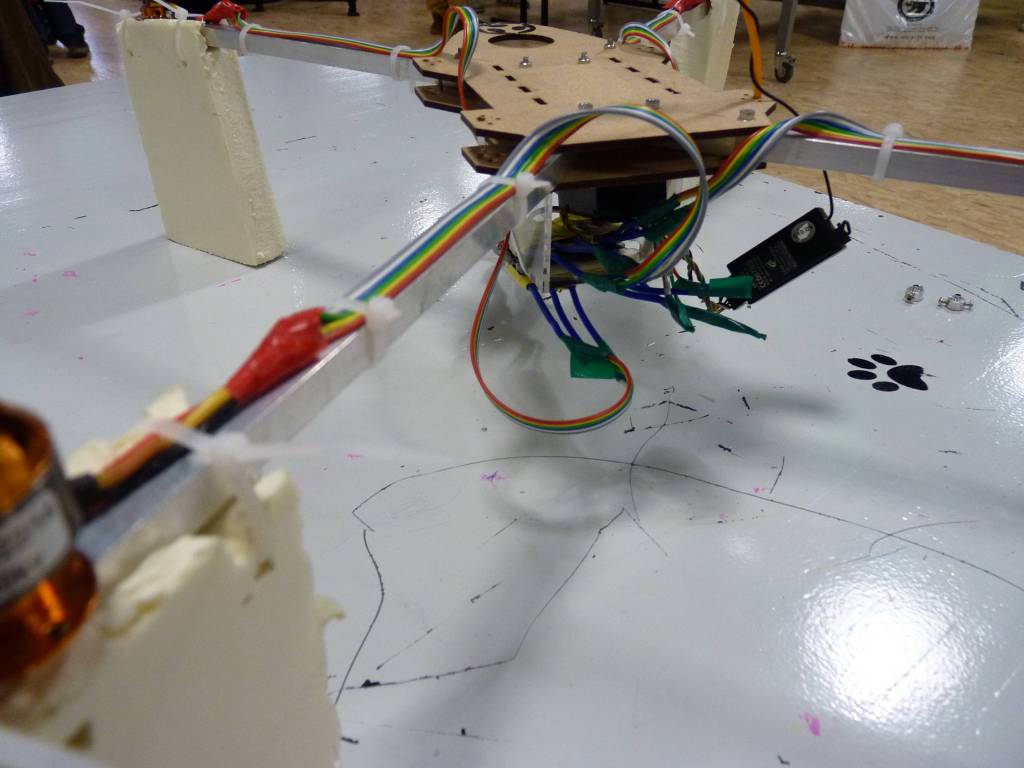
CONCEPTION
I
–La base à était principalement réalisé avec Inkscape et je vous invite
à commencer à l'utiliser car c'est, pour moi, le logiciel le plus complet et Open Source
des logiciels de vectorisation en 2 dimensions.–
Je suis navré mais le fichier de vectorisation 2D à été malheureusement perdu lors du grand formatage de toute les clé USB du Fab Lab avant d'être publié!
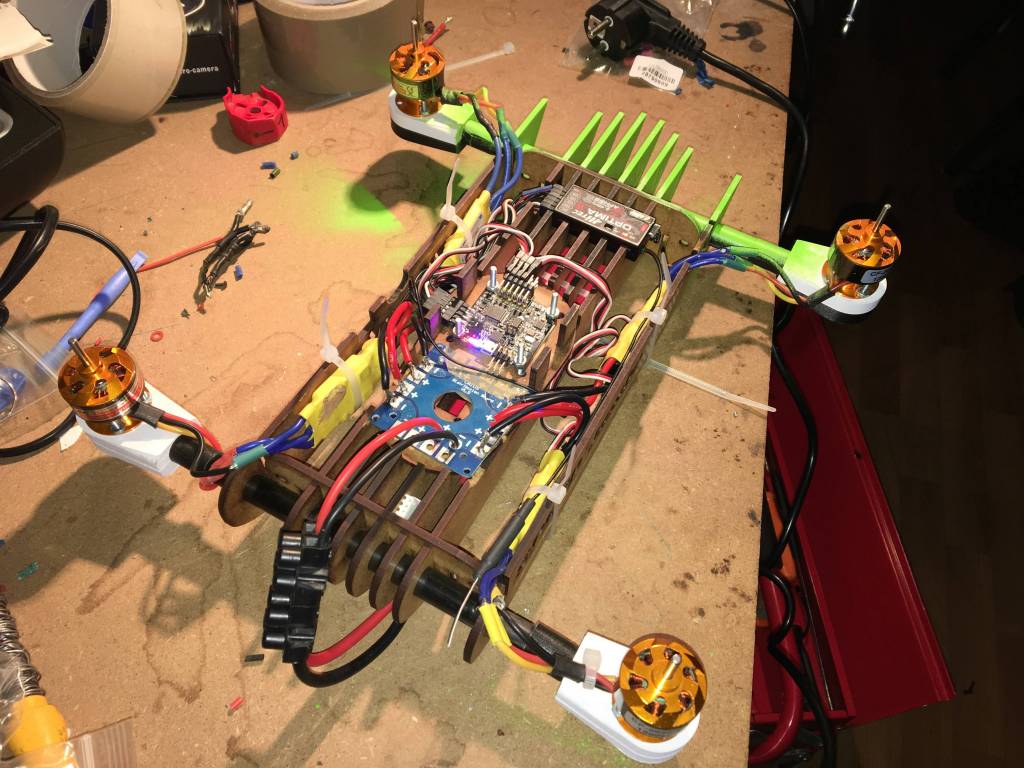
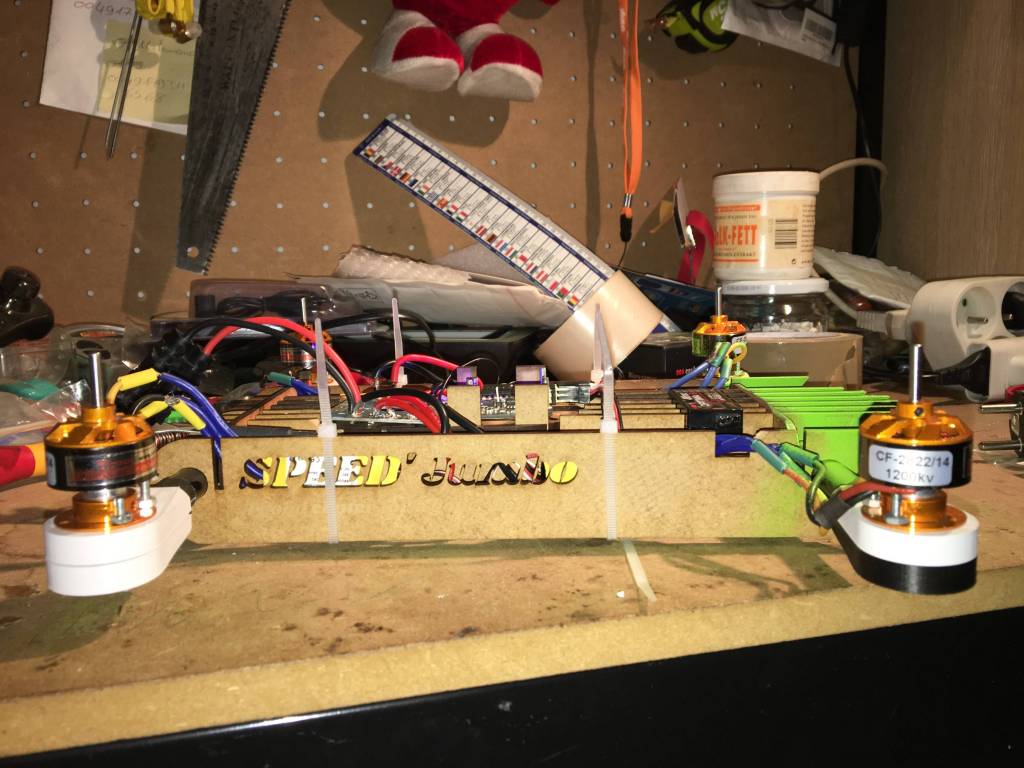
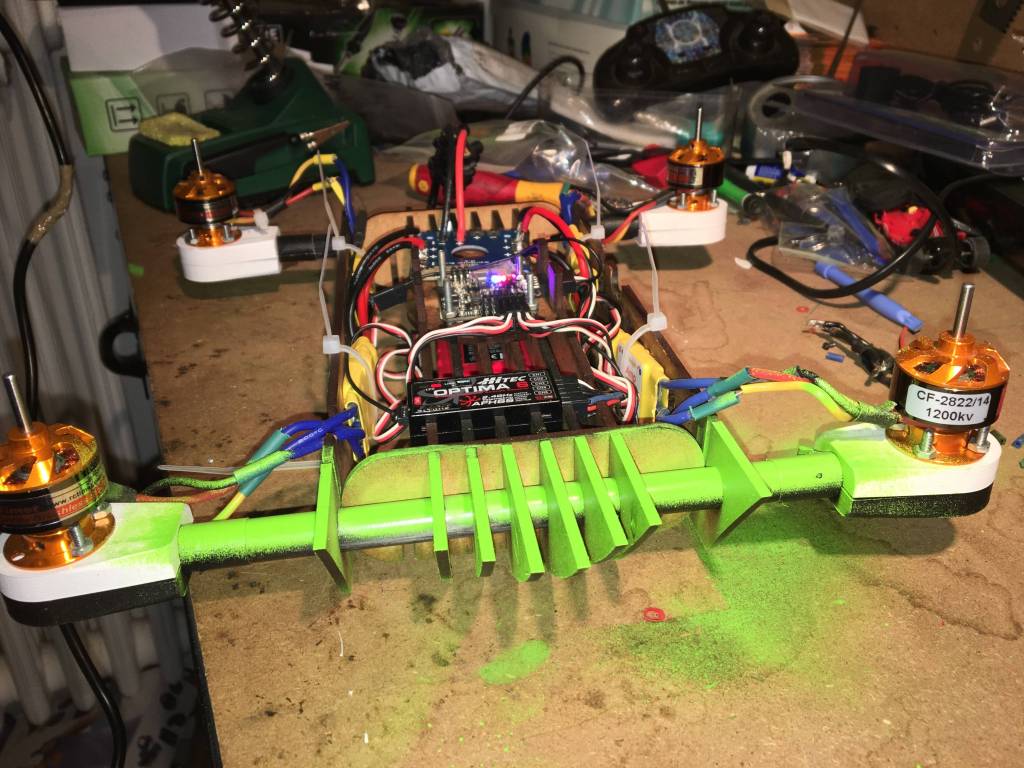
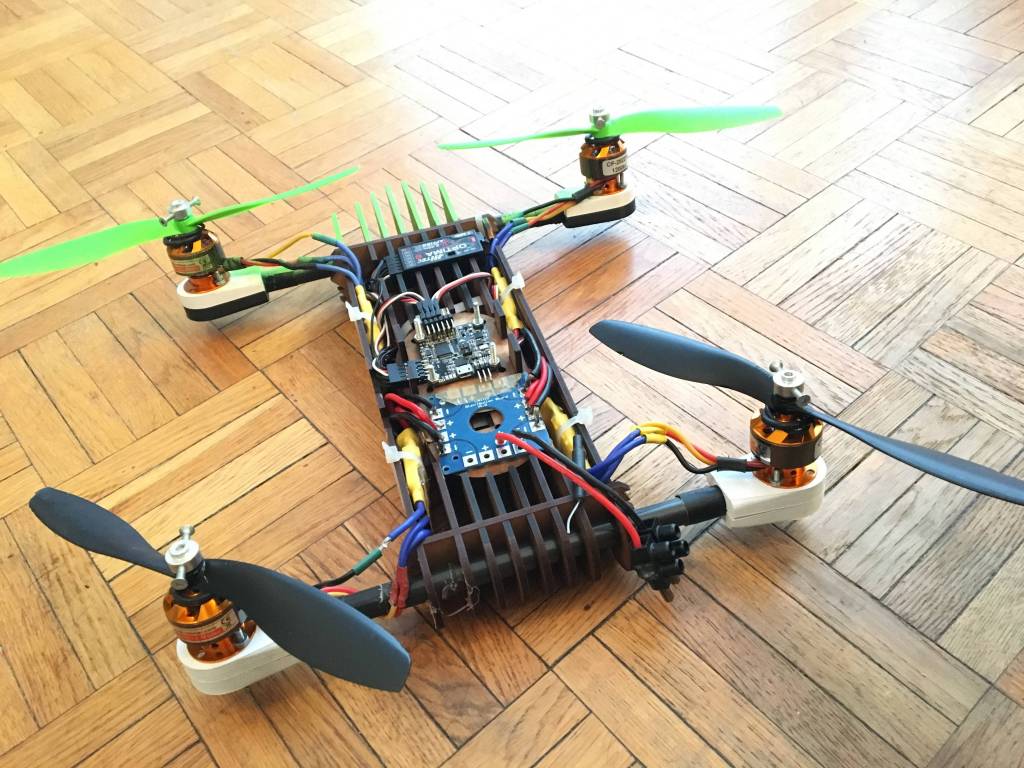
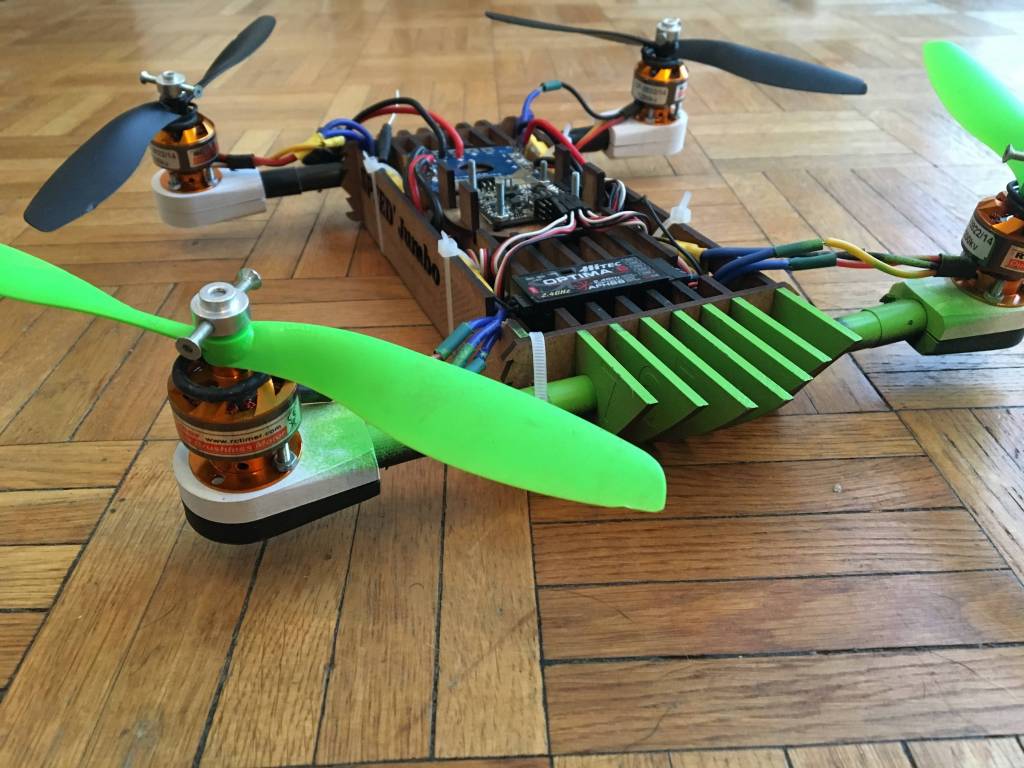
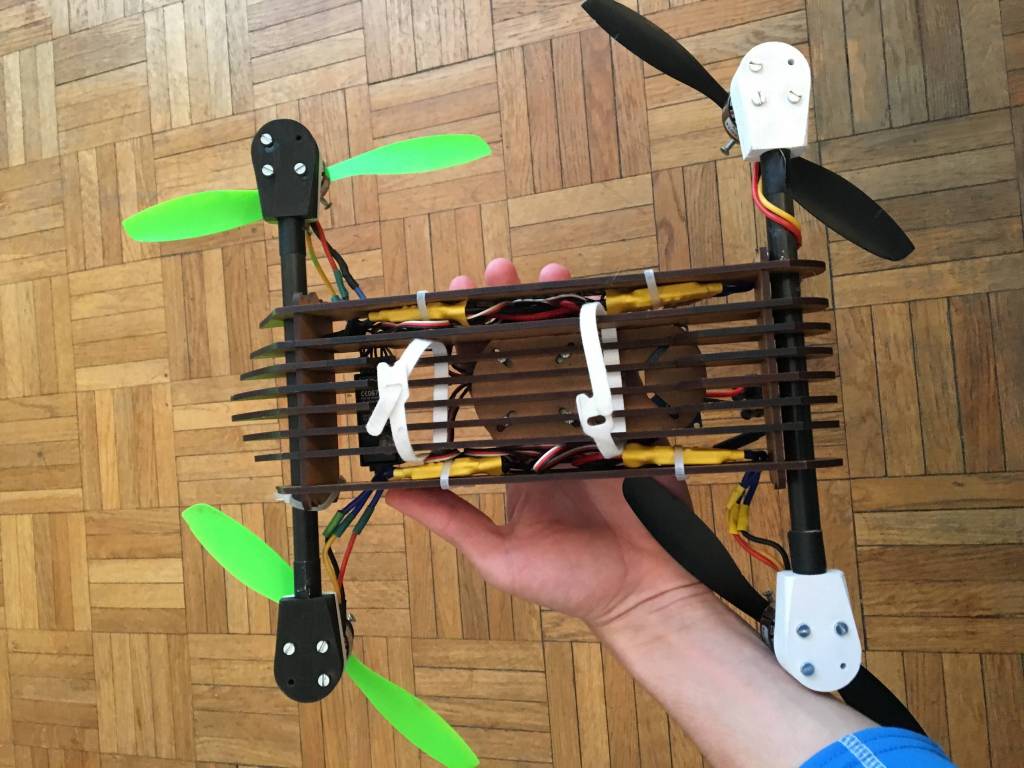
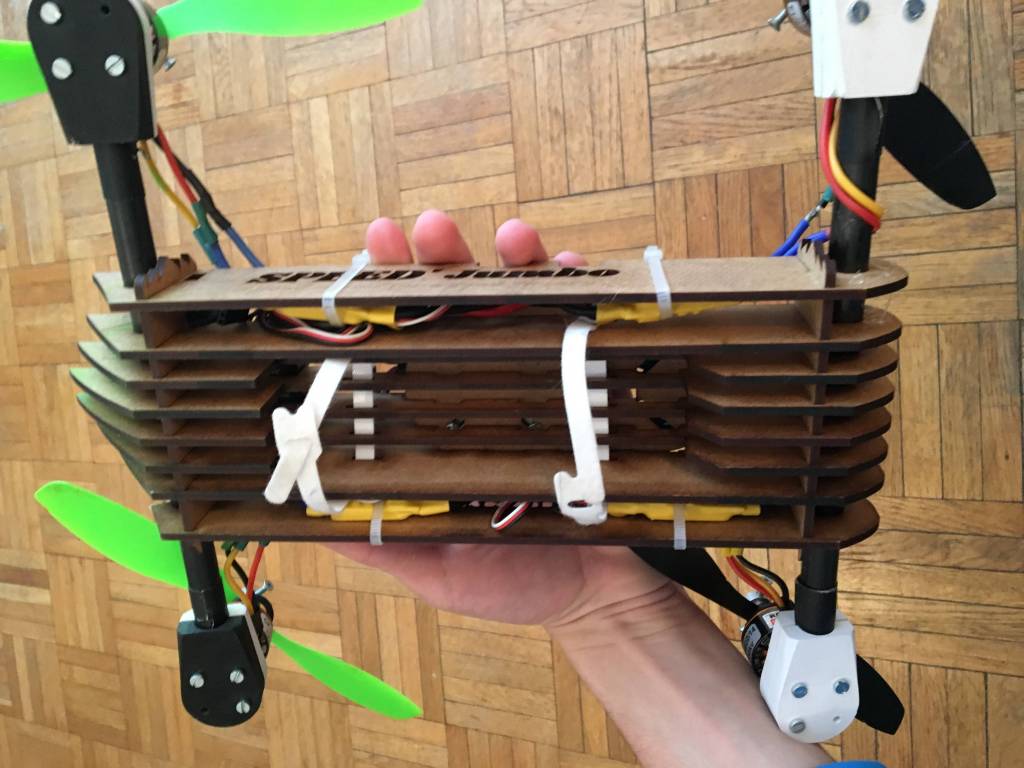
Vous pourrais quand même observé la forme de la base de la structure (bizarrement inspiré de star trek) que j'ai modélisé sur Inkscape et découpé avec la Speedy300 !
**Pour le faire on entame d’abord le fichier de la découpe de la base du quadricoptére qui va tenir les bras.
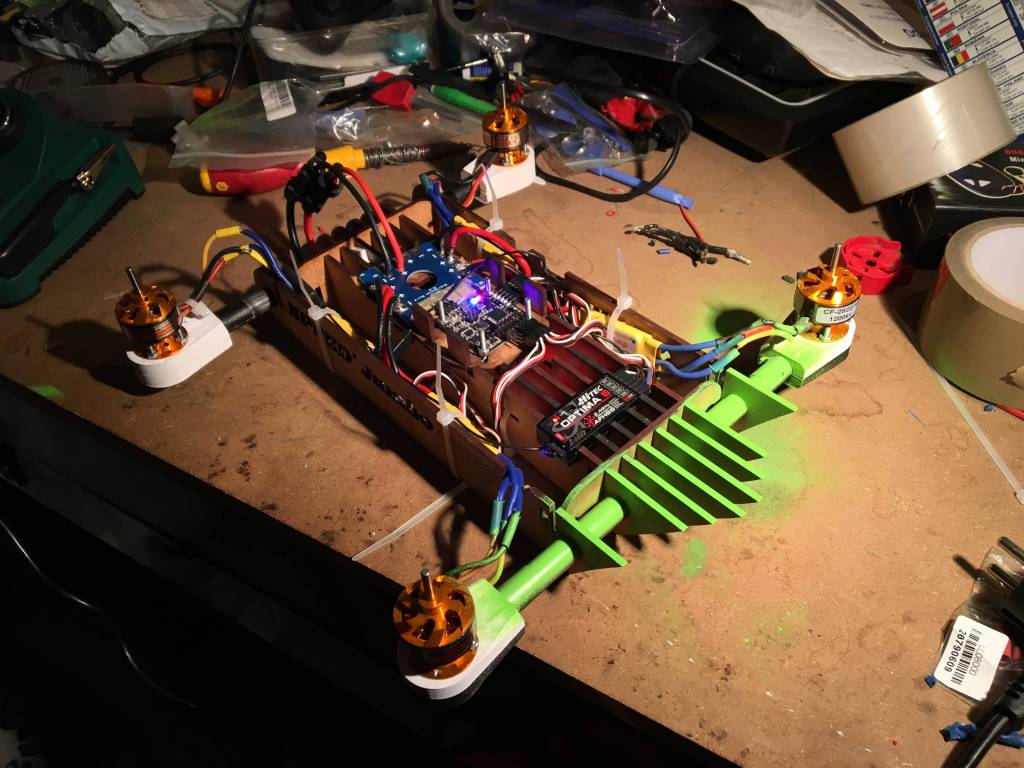
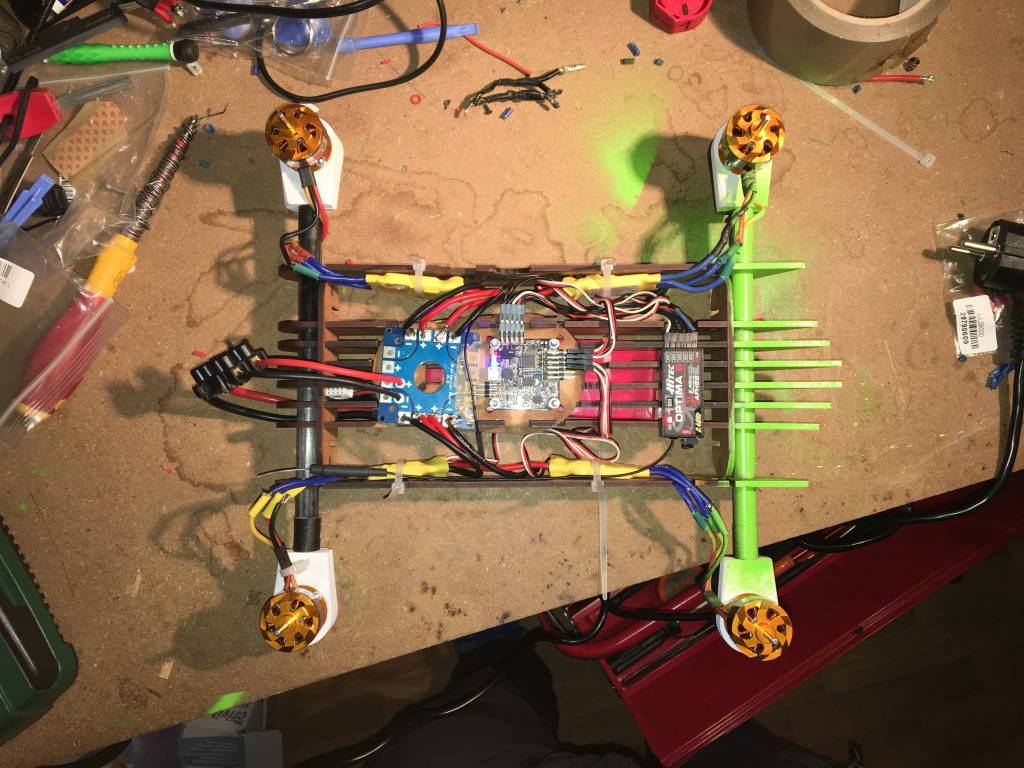
Galerie de photos plus récentes du nouveau quadricoptere

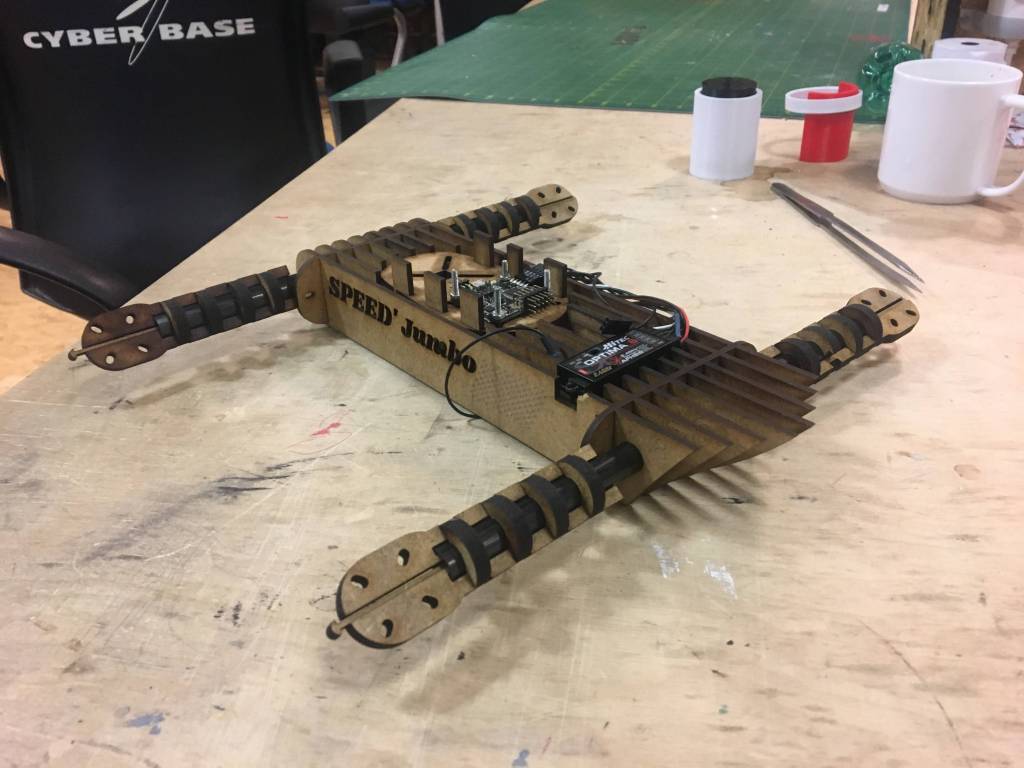



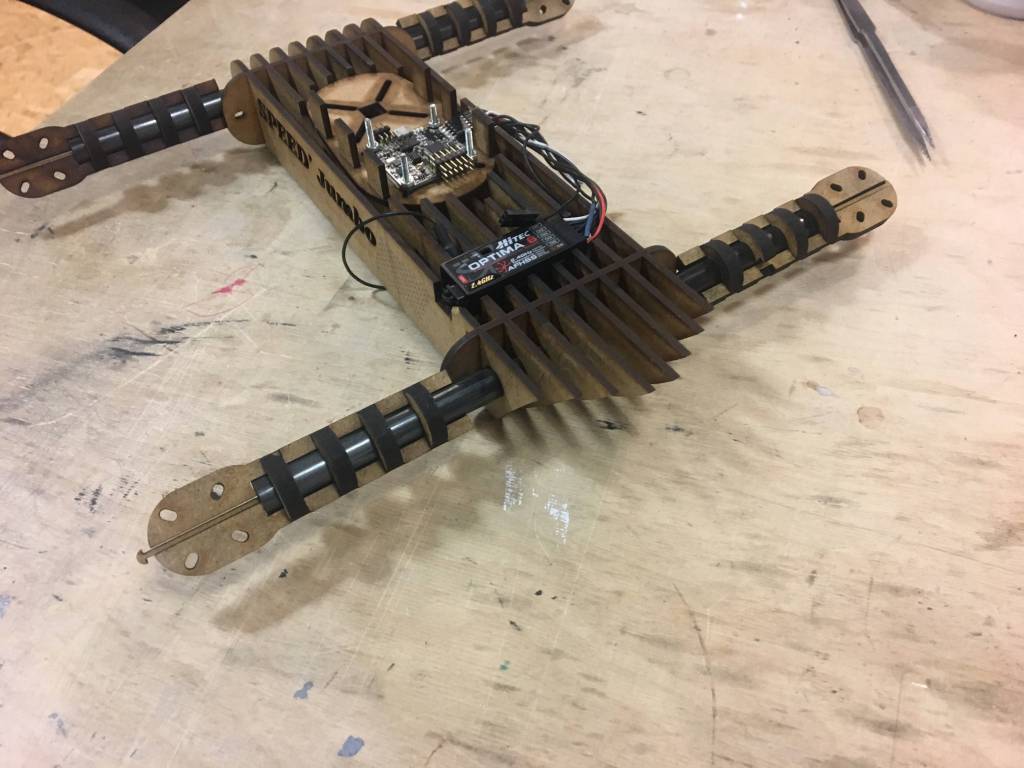




Galerie de photos très très anciennes







Séquences de tests
Éditée, réalisé et crée principalement par SH2282000 .
vous donne mon adresse mail pour toute question!! ”shannah.santucci@gmail.com”