Outils d'utilisateurs
Sidebar
projets:robot_poppyno_avec_arduino
Table des matières
Robot Poppyno avec Arduino
Fiche projet

Table des matières
L'objectif est de construire un robot bipède très bon marché, inspiré de Poppy, programmable via une carte Arduino Uno, permettant de faire des essais dans une optique pédagogique.
A l'heure actuelle,je participe, dans le cadre des Samedis Robots, au projet Conception d'un robot à base d'Arduino avant de m'attaquer à celui-ci, afin d'acquérir les bases.
Conception
Plusieurs idées
J'ai d'abord imaginé et modélisé sur Blender une déclinaison de robots, plus économique que Poppy, allant d'une tête à une version entière avec plusieurs servomoteurs XL-320. Je me suis ensuite concentrée sur la tête avec l'idée de partir d'une plaque d'essai sans soudure comme base.
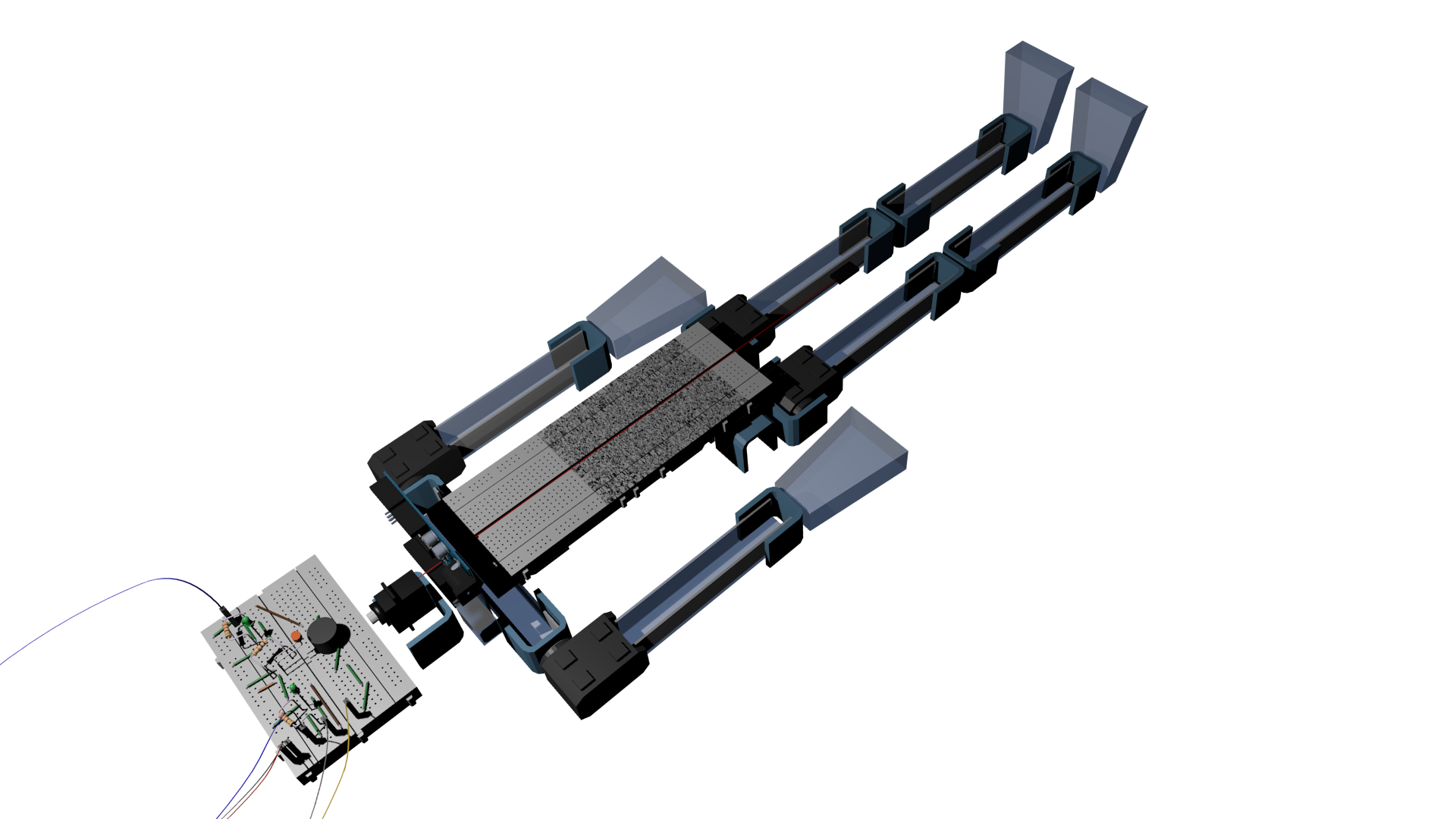
Ensuite, j'ai imaginé et modélisé une version entière d'un robot bipède, avec le moins de moteurs possibles.
J'ai ensuite commencé le montage d'une tête simplifiée, en utilisant différents composants de mon kit Sainsmart.
Logiciels utilisés
- Système d'exploitation : Linux (Ubuntu 14.04) et Android 4.1 (tablette et téléphone)
- Blender 2.77 : modélisation 3D
- Inkscape : Dessin vectoriel
- Gimp: retouche des photos
- Writer (Libre Office) : traitement de texte pour rédaction des fiches
- IDE Arduino (pour PC) et appli ArduinoDroid (pour tablette)
Réalisation
Matériel personnel
- kit Sainsmart SKU:20-013-105*WB (carte comprise, assez cher, pas de documentation, résistances 220 Ohms uniquement). j'ai moi-même conçu une notice
- sidekit basic kit (sans carte et peu fourni mais très bien documenté, avec breadboard 400points de taille idéale pour le visage + un Grove servo moteur)
- carte Selectronic Uno
- Hub USB (pour protéger l'ordinateur) avec interrupteur
- Tablette MPMAN MPQC1006 8 Go et adaptateur USB vers micro USB
- Appareil photo Lumix Panasonic TZ61 et téléphone portable (pour documenter le projet)
A la maison :
- PC fixe avec double écran, sous Ubuntu 14.04
- Imprimante 2D Canon pixma IP2600 (difficile à installer sur Ubuntu)
- Scanner Canoscan Lide 60
Achats via internet sur Cdiscount :
- Servomoteur Numérique Haute Vitesse Pour RC Helicopter Avion (livraison annulée par le vendeur)
- MR.RC High Precision Micro vitesse SG90 Servo Pour RC Airplane (un seul reçu un peu hors délai, mais je pensais en avoir commandé 2)
- Kit 140 Fils et Cavaliers Pas sans Soudure pour Carte d'Expérimentation pour Arduino (reçu très en retard)
Outils et matériel utilisés au fablab
- Ordinateur portable. J'y ai installé l'IDE Arduino (besoin d'un animateur pour le code admin)
- Un usager s'est servi d'une loupe pour mieux voir les couleurs de mes résistances
- Multimètre (avec l'aide de Philippe) pour tester les valeurs de mes résistances
- Outil pour chauffer une aiguille afin de percer des trous dans du plastique (encore avec l'aide de Philippe !) et pince pour la maintenir
- Imprimante 3D Mondrian. C'est un habitué qui m'a fait le premier essai, je ne l'ai pas utilisée moi-même. Logiciels slic3r : convertit des modèles 3D (STL, OBJ, AMF) en GCODE.
Tête du robot
J'ai fait plusieurs essais de montage sur une breadboard 400 pts mais comme je viens de recevoir un lot de 10 pièces Mini soudure Prototype Breadboard 170 points de liaison pour Arduino Shield New SG191-SZ, je vais refaire des essais avec, pour que chaque breadboard reçoive un composant.
Comme j'ai eu aussi l'idée de mettre le montage dans une boite, avec juste des “détrompeurs” et un cache (ou masque) en papier ou carton, je le documente sur Tête de robot en boite
L'étape suivante est de pouvoir disposer de composants modulables pour pouvoir changer comme on le souhaite la tête du robot. Dans cette optique, je divise mon visage en blocs de taille identiques. J'ai fait plusieurs essais.
Nouvelles idées en venant au fablab
Samedi dernier, ma tablette étant déchargée (bien que non utilisée depuis la dernière fois), je n'ai pas pu re-tester mon montage, mais j'ai eu plein d'aide:
- Un habitué m'a rapidement imprimé une petite pièce sur l'imprimante 3D : un petit bloc avec 2 petite rangées de trous sur lequel on pourrait réunir la led et la résistance associée, pour simplifier le montage pour des enfants (Ça existe déjà, mais c'est assez cher dans le commerce). Il faudra revoir le modèle car les trous étaient trop petits, mais j'ai pu voir les logiciels utilisés pour la découpe et l'envoi vers l'imprimante. Je voudrais aussi que la résistance soit cachée, et pas la led.
- Pour essayer de percer les trous à l'aide d'une aiguille chauffée, j'ai eu de nouveau l'aide de Philippe qui m'a expliqué comment utilisé l'instrument de chauffage (dont je n'ai pas retenu le nom).
- Il est conseillé de fixer le montage sur une planchette, mais pour mon projet, ça m'embête un peu, je vais essayer de réfléchir à une autre méthode, peut-être emboîter dans des cases ?
- Un autre m'a conseillé d'utiliser des résistances 3/4, dont le fil est plus gros et plus costaud. Il pense que les leds 5mm sont préférables aux leds 3mm pour ce projet.
Préparation composants clipsables
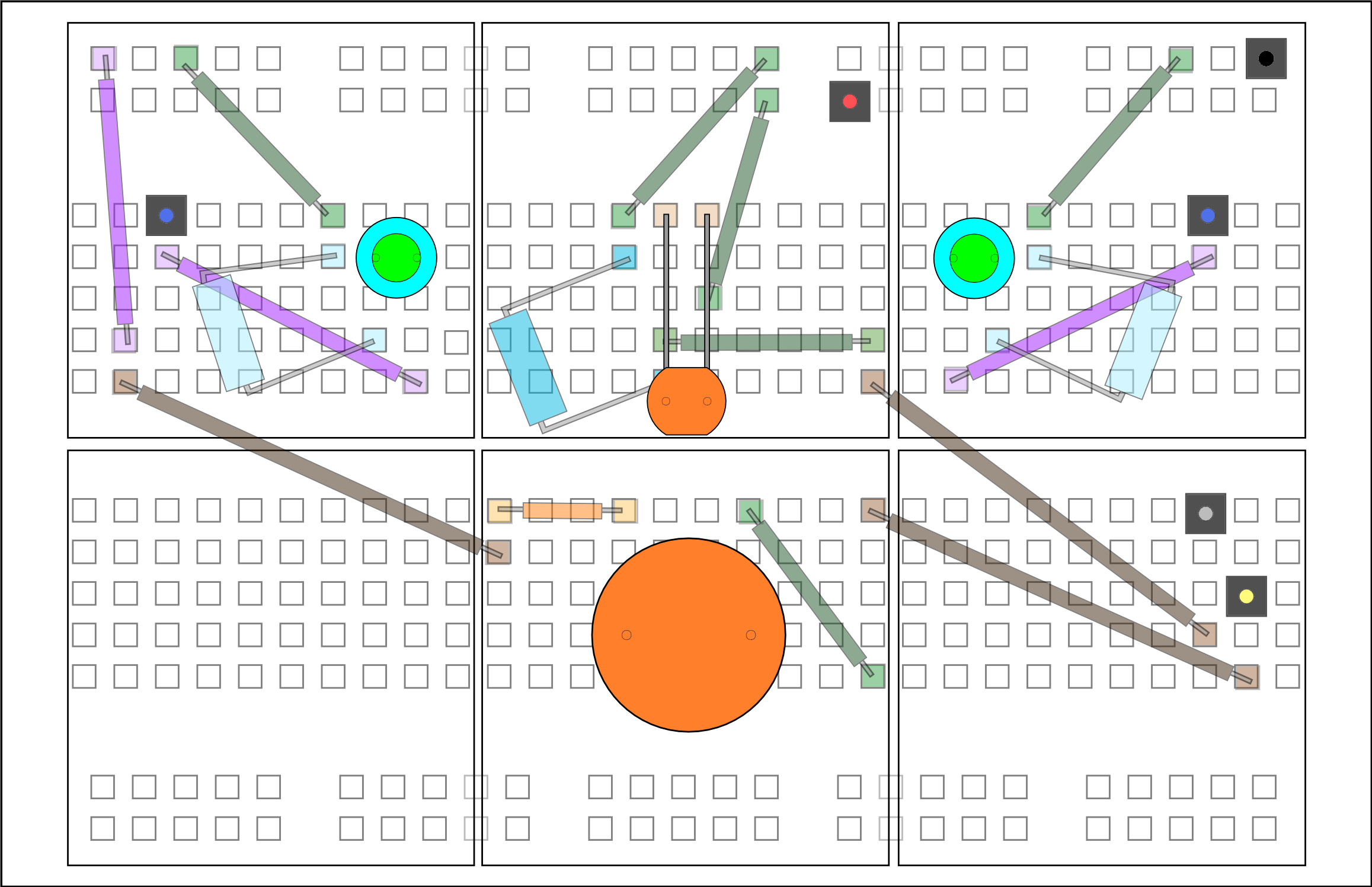
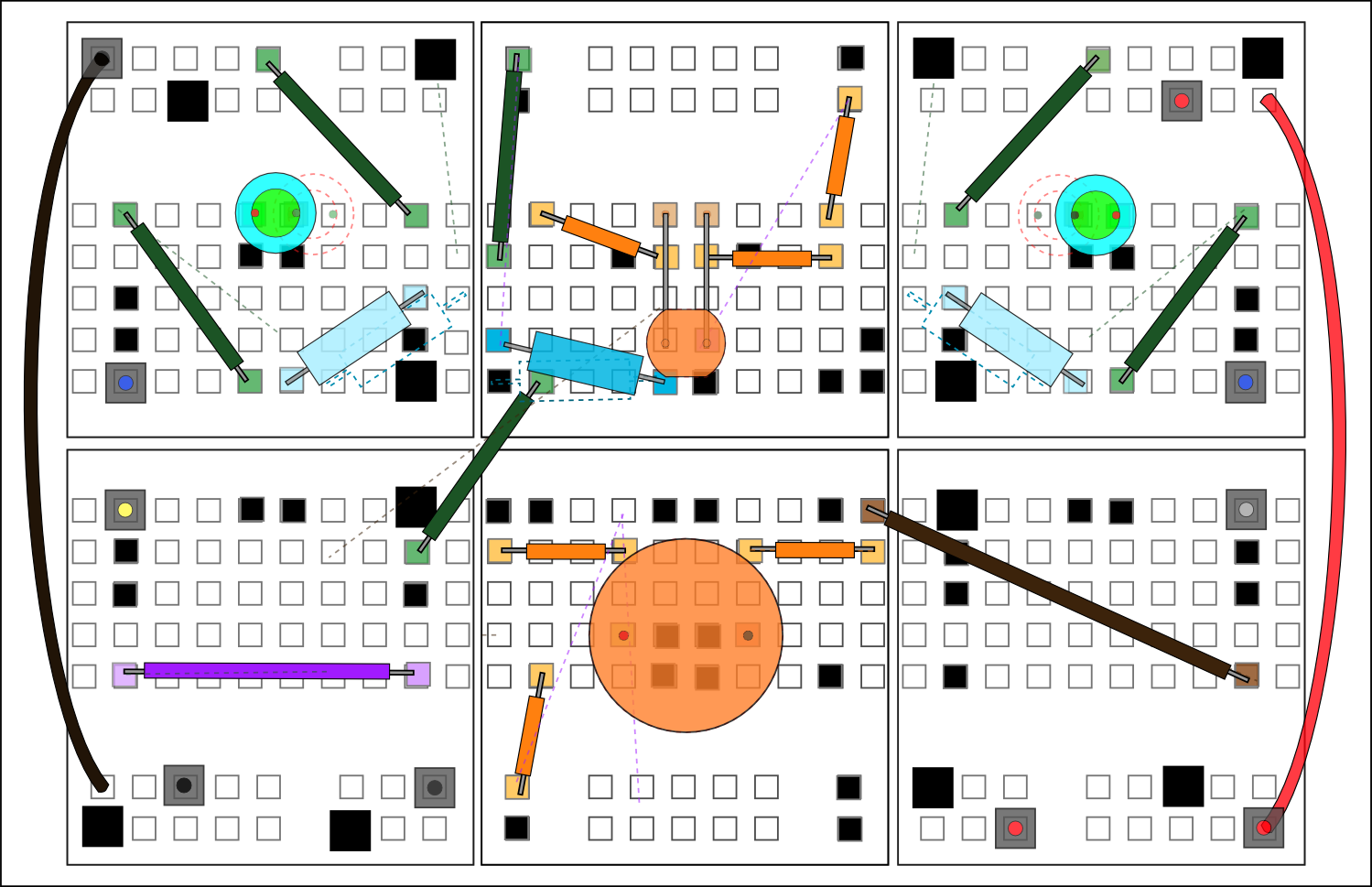
J'ai aussi réalisé une plaque d'essai 400 pts avec Blender en m'inspirant d'un tutoriel vidéo (sans paroles) de MatteReal. Cette plaque d'expérimentation virtuelle m'aidera à imaginer comment réaliser la tête de mon robot. Je commence à réfléchir dans un autre fichier Blender comment concevoir les blocs à clipser.
Je dois cependant retravailler un nouveau fichier blend (+ version ortho) une fois avoir refait mon montage sur la breadboard, en surélevant un peu les résistances et en plaçant les composants de manière plus compacte et logique. Le dernier test devra être revu en fonction du travail sur Inkscape.





Dans mon projet, je commence à ajouter de l'épaisseur aux parois des éléments où seront placés les composants électroniques, mais je ne suis pas sûre de la taille exacte à choisir, de l'espace à prévoir entre 2 parois, s'il faut faire des éléments creux pour économiser de la matière et comment clipser les éléments entre eux…
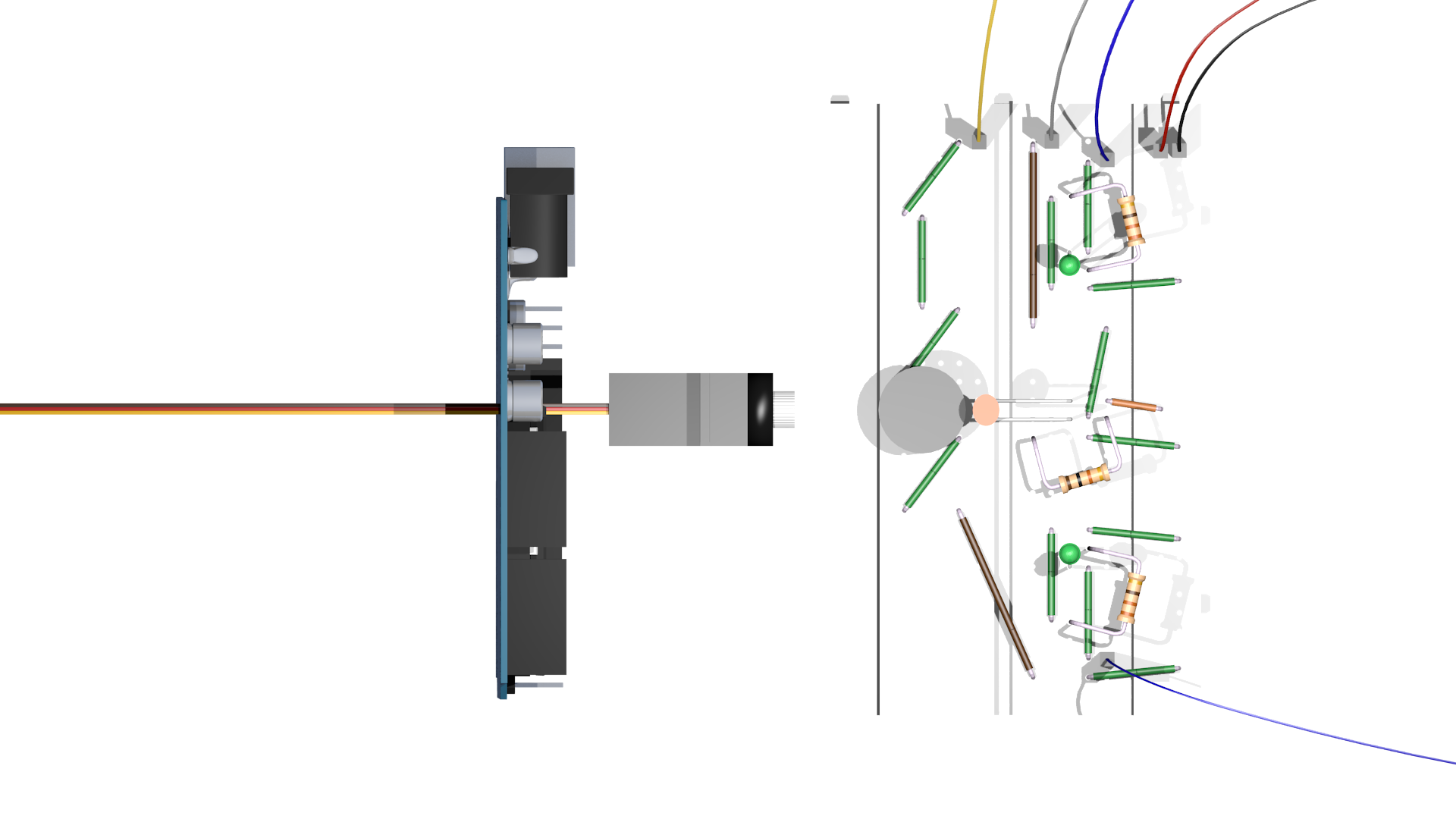
Préparation servomoteurs
copie légèrement transformée (suite à des problèmes de rendu) d'une arduino modélisée par Evan Boldt
 modélisation du servomoteur du sidekit basic kit.
modélisation du servomoteur du sidekit basic kit.
Il faudrait que je vérifie quel poids il peut supporter et comment monter la tête dessus.
fichier Blender avec le servomoteur
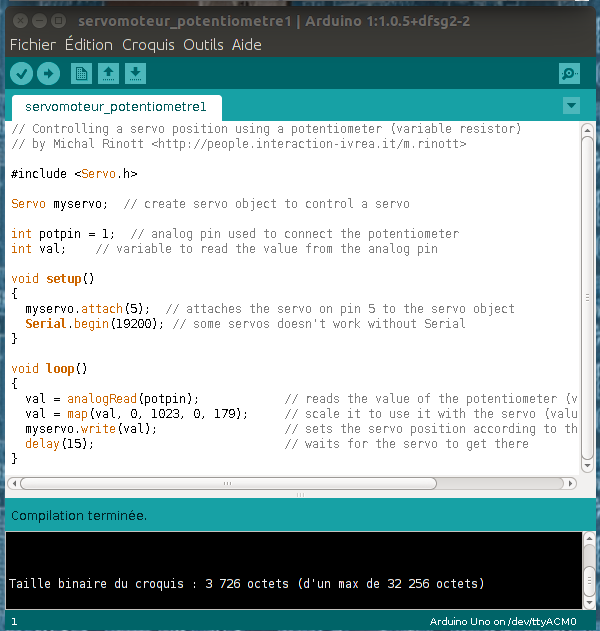
Test servomoteur et potentiomètre
Montage et programme servomoteur avec potentiomètre d'après le tuto du wiki de seeedstudio

Préparation Robot entier
Difficultés actuelles
Connecter l'Arduino à ma tablette ou à mon téléphone
Au fablab ou aux Samedis Robots, l'accès aux ordinateurs portables n'est pas toujours possible.
J'apporte ma tablette mpman mpdc1006 8gb et un adaptateur USB vers micro USB. Auparavant, j'ai recherché les modèles disponibles et fait une petite fiche de rappel.
Mais l'appli Arduinodroid n'a jusqu'ici pas fonctionné.
Lors du premier upload d'un sketch (avec l'exemple Blink), elle propose plusieurs ports USB mais je ne sais lequel choisir et l'upload des sketchs est alors bloqué. Pour que l'appli repropose le choix entre les ports, je dois vider le cache de ma tablette dans les paramètres, mais j'ai toujours 2 ou 3 ports indiqués (dont 2 marqués Arduino) et 1 non reconnu. L'upload ne fonctionne pas quelque soit mon choix.
Le câble adaptateur n'est pas en cause, j'en ai essayé un autre : même problème. Pas facile de trouver si ma tablette et mon téléphone sont bien compatibles OTG. Ma tablette a bien un USB host, est-ce bien la même chose ? Le câble adaptateur ne me permet pas non plus de récupérer les photos de mon appareil photo numérique sur ma tablette.
On m'a conseillé d'updater Android (4.2.2 sur ma tablette mpman mpdc1006 8gb et Jelly Bean 4.1.1 sur mon téléphone Bouygues Telecom BS 471) mais la mise à jour via la tablette indique que j'ai la dernière version android disponible.
La page Program your Arduino with an Android device! indique que l'appli fonctionne à partir de la version 2.2 d'Android donc ça devrait fonctionner avec la tablette.
Autre problème : Je n'ai pas accès sur ma tablette à mes fichiers Inkscape et Blender (en ligne ou sur ma clé USB) et les png transparents se présentent sur fond noir et non sur damier, cachant ainsi les éventuels éléments noirs de l'image. Le site Autodesk123D circuits ne s'affiche pas non plus.
Suites du projet
Précision de l'objectif
L'objectif est surtout pédagogique. Il s'agirait pour des débutants ou des jeunes, de pouvoir apprendre à construire et à programmer ce robot, au prix le plus bas possible, en ayant juste les principaux capteurs, actionneurs et composants.
Les robots de type Ergo Jr sont sympas mais je préfère un robot entier à un bras seul.
Il doit être modulable et contenir des composants clipsables facilement réalisables par quelqu'un d'un peu bricoleur (enseignant, animateur, amateur…), qui pourront ensuite être utilisés par des enfants plus jeunes pour faire des tests.
Ce projet me permettra personnellement d'apprendre beaucoup de choses, de manière progressive, et, si je le mène à bien, j'aurai j'espère le plaisir d'avoir un robot bipède à moi pour un prix raisonnable.
Mon projet final est sans doute très ambitieux étant donné mon peu de connaissances en électronique et en robotique. Merci à tous ceux qui m'accordent leur temps et leurs conseils.
Division du projet
Tout doit être conçu de manière modulaire.
Conseil d'un visiteur des Samedis Robots : Réfléchir au projet de manière globale, en pensant à la façon d'articuler les différents éléments (tête, buste, membres…) de la manière la plus adaptée à un système modulable.
Composants clipsables
Les composants clipsables (qui réuniront par exemple led + résistance dans un bloc) devront être facilement réalisables par un adulte ou un adolescent (de préférence sans soudures), et pourront ensuite servir à des enfants plus jeunes pour réaliser leur modèle personnel.
2 options :
- blocs imprimés en 3D, avec emplacement de composants très basiques à intégrer (pour les changer facilement) avant de les clipser ou avec détrompeurs pour faciliter le montage
- blocs imprimés en 3D avec composants intégrés (en prévoyant des composants plus solides ou un système magnétique)
Corps du robot et servomoteurs
Moteurs pour le cou, les jambes et les bras : Dans un souci pédagogique, utiliser différents types de moteurs pour les articulations : pas-a-pas, courant continu et servomoteurs.
Prévoir fixation simple des moteurs et des membres
Penser à l'alimentation et à la manière de reprogrammer facilement la carte Arduino.
Capteurs pour les mains ?
Pour gérer le programme pour tous ses composants différents, voir le tuto Adafruit-multi-tasking-the-arduino-part-1
Difficultés à prévoir
Comment fixer les éléments pour le projet final sans soudures ?
J'ai peur de faire des soudures ![]() et dans une optique de travail avec des enfants de CM1/CM2 (public avec lequel je travaille, entre autres), les soudures ne sont pas très faciles à envisager.
et dans une optique de travail avec des enfants de CM1/CM2 (public avec lequel je travaille, entre autres), les soudures ne sont pas très faciles à envisager.
Composants clipsables existants (chers):
- Projets “faits maison”: Cubetto réalisé dans un fablab, documenté mais est-ce que ça peut fonctionner sur mon projet ?
On peut aussi créer au fablab des plaques d'essai perforées spécialement pour le projet, avec des composants soudés, et les enfants n'auront qu'à les clipser.
Quels capteurs utiliser ?
Ex: capteurs au niveau des oreilles pour tourner la tête au robot quand on approche la main ou qu'on le touche : infrarouge, ultrasons ?
Penser au poids de la tête, qui doit être suffisamment léger pour être géré par un petit servomoteur bon marché. Idem pour la fixation.
On peut aussi prévoir un capteur de pression dans les mains, qui ferait monter et descendre le bras. Ou tout simplement un bouton poussoir, pour reprendre les exemples de Thierry lors des Samedis robots.
Marche
Il faudra voir la stabilité du système, la tête risquant d'être trop lourde et les composants clipsables risquant de bouger beaucoup lors de la marche
Quelques idées pour la simplifier :
- remplacer les 2 moteurs des jambes par un seul moteur DC bon marché (idée d'Edddy). Voir vidéos d'exemples sur le topic du poppy project
- système de marche sans moteur (Wobbly ou le robot Andador de Roberto Lou Ma) où mettre la tête (breadboard + carte arduino + alim) et les bras sur des petits servomoteurs.
- systèmes du même type que ceux utilisés sur les poupées des années 70.
- jambes statiques (ou sur roues), ou utiliser un socle façon mannequin à dessin (idée d'un usager du fablab)
Une solution : Projet de robot roulant
Il est envisagé de créer un robot à roues à plusieurs aux Samedis Robots, ça pourrait être une option plus simple, selon les autres participants.
On peut partir du robot roulant de Cédric Doutriaux où une petite roue avant permet de conserver l'équilibre.
1ère idée : s'inspirer du robot Pepper, qui est monté sur roues bien qu'humanoïde. ou version 2 avec la carte arduino sur les épaules.
2ème idée : Si l'équilibre est meilleur avec une hauteur réduite, reprendre un peu le look de Pedro le robot, fait au fablab par Maxime, mais avec des parties qu'on peut enlever et bouger.
3ème idée : Un robot de taille intermédiaire entre les 2 précédents avec le visage composé de 6 mini-breadboards (faire un test avec les 6 breadboard en position verticale, pour de + jolies proportions)



Sites et pages utiles
Sources d'inspiration
Recherches préparatoires
- Téléchargement des datasheet des composants
- Livres empruntés à la bibliothèque de la Cité des Sciences et à la bibliothèque municipale (ou achetés), journaux…
Simulations, schémas préparatoires, modélisation virtuelle du projet
- scheme-it : Conception de schémas électriques
J'ai préféré des solutions en ligne gratuites même si elles ne sont pas libres.
Partage et conseils
- mon topic sur le forum du Poppy project : Poppy est un robot humanoïde open source (visible aux Samedis robots du Carrefour Numérique, les 3ème samedis du mois).
- Blender User Group : Organise des rendez-vous tous les 1ers samedis du mois au Carrefour numérique sur Blender. L'aide d'Edddy m'a été très précieuse
- PDF illustré sur la soudure (en anglais), conseillé par un usager du BUG, Abdoul
- wiki du fablab, aide des habitués, partage avec d'autres usagers, rédaction progressive de cette page (pour se souvenir également)…
Robots avec tutoriels
Achats à prévoir
Kits avec plusieurs servomoteurs, par ex :
- Starter Kit Robot Bipede à 240 €
- Kit de Robot Bipède Programmable ALLBOT à 99,90 €
Mais ils ne sont pas super beaux et il y a plein de pièces inutiles pour moi et d'autres qui manquent pour mon projet.
Servomoteurs un à un ou par lots :
Liste Google, prix par ordre croissant
Modèle le moins cher :
- Marque : Towerpro
- Modèle : SG90
- Matériel ABS, rouages en plastique
- Couleur Bleu
- Poids : 9g
- Dimension: 23×12.2x29mm
- Torsion:1.6KG/CM
- angle maximum:180degreé
- Vitesse de fonctionnement:0.12-0.13sec/60 degré
- Température Rang -30 ℃ ~ 60 ℃\n
- Zone d'inefficacité :o.o5sec
- Prise disponible:JR,FUTAB
- modèle :verso simulateur
- Tension de fonctionnement : 4.8V
- voltage de fonctionnement :3.5-6V
- longueur de câble : 25cm
- Largeur de bande morte : nous 4
- Convient pour Hélicoptères R / C
Plusieurs vendeurs :
TowerPro SG90 9G Mini Servo avec accessoires - Bleu à 2.15 € (en solde, prix normal : 3,31€) - Pour 5 servos, 1.89 € frais ports (marqué aussi livraison gratuite en 24h pour la France) = 12,64 pour 5 servos
pour l'EU : TowerPro SG90 9G Mini Servo with Accessories - Blue à 2,41 € (soldé prix normal : 2,71 €) - livraison gratuite en 5-7 jours à partir de 30 € de commande = 12,05€ (ou 13,55 € sans les soldes) pour 5 servos (mais voir autres produits)
TowerPro SG90 Mini Servos 9g pour 450 Hélicoptère à ailes fixes à €1,39 - €1,36 pour 3 à 9 servos - port pour 5 servos : €6,22 pour 12-23 jours ouvrables = 13,02€ pour 5 servos
Tour Pro SG90 9G Spare Part Servo pour hélicoptère RC Bleu à €2.79 - livraison gratuite 3-7 jours (voire plus car produit très demandé) = 13,95 € pour 5 servos
Autre servomoteur pas cher :
MR.RC 9g Mini Servo SG90 pour 450 RC Hélicoptère Avion à 2,24 € (prix normal : 2,29€) - €2,19 pour 3 à 9 servos - port pour 5 servos : €6,22 pour 12-23 jours ouvrables = 17,17 € pour 5 servos
- Couleur: Orange
- Voltage: 4.8-6.0V
- Torque: 1.5/1.8kg.cm
- Vitesse: 0.12/0.10s/60°
- adapté aux hélicoptères & Avions
- avec armement et vis
Difficultés rencontrées
A la maison, les outils et les matériaux pour bricoler sont limités. Je ne peux me rendre au fablab que le samedi. Par contre, cela m'oblige à être créative.
Le regard extérieur des autres usagers pourrait pourtant m'éviter des erreurs de conception ou m'aider à progresser.
Le fablab est aussi ouvert le 1er dimanche par mois, bonne nouvelle. Une soirée en nocturne (19-21h par ex), de temps à autre serait aussi super (pour les usagers, moins pour les médiateurs…)
Pour utiliser les outils du fablab, l'aide des habitués (ou des animateurs) est franchement nécessaire ! Je n'ose pas les déranger trop souvent, mais ils viennent souvent d'eux mêmes !
Remèdes
Aide et soutien d'usagers du BUG, des Samedis Robots et du fablab :
- Partage dans les 2 sens : Un jeune usager a été très content de voir qu'on pouvait utiliser la tablette avec la carte Arduino (même si je n'ai pas encore totalement réussi)
Problèmes matériels et organisationnels
Dans une optique pédagogique, je veux utiliser du matériel simple et facile à trouver : essais à base de carton, papier, etc… et de composants venant de kits peu onéreux.
Photos
projets/robot_poppyno_avec_arduino.txt · Dernière modification: 2017/11/12 01:11 par doudoulolita
Universcience -
Carrefour numérique² -
@CarrNum -
Cité des sciences et de l'industrie -
30 avenue Corentin Cariou 75019 Paris
Sauf mention contraire, le contenu de ce wiki est placé sous la licence suivante : CC Attribution-Share Alike 3.0 Unported
